Service Brake Pad Monitor Message Reset
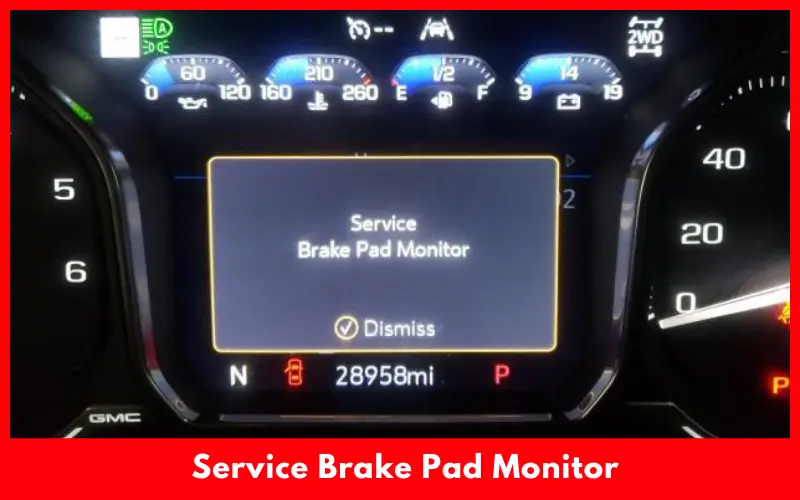
Service brake pad monitor message means that you car brake pads have faults. Brake pad life monitor is also triggered due to low brake fluid, bad brake fluid or damaged brake pad system. You should replace the damaged brake pads and reset service brake pad monitor. You shouldn’t continue driving with the service brake pad monitor message as it can … Continue Reading